Arquitectura Ciberfísica
Esta es la sección más importante del proyecto. La arquitectura ciberfísica define cómo cada componente físico y digital se comunica, qué protocolo utiliza y cuál es su rol dentro del sistema integrado.
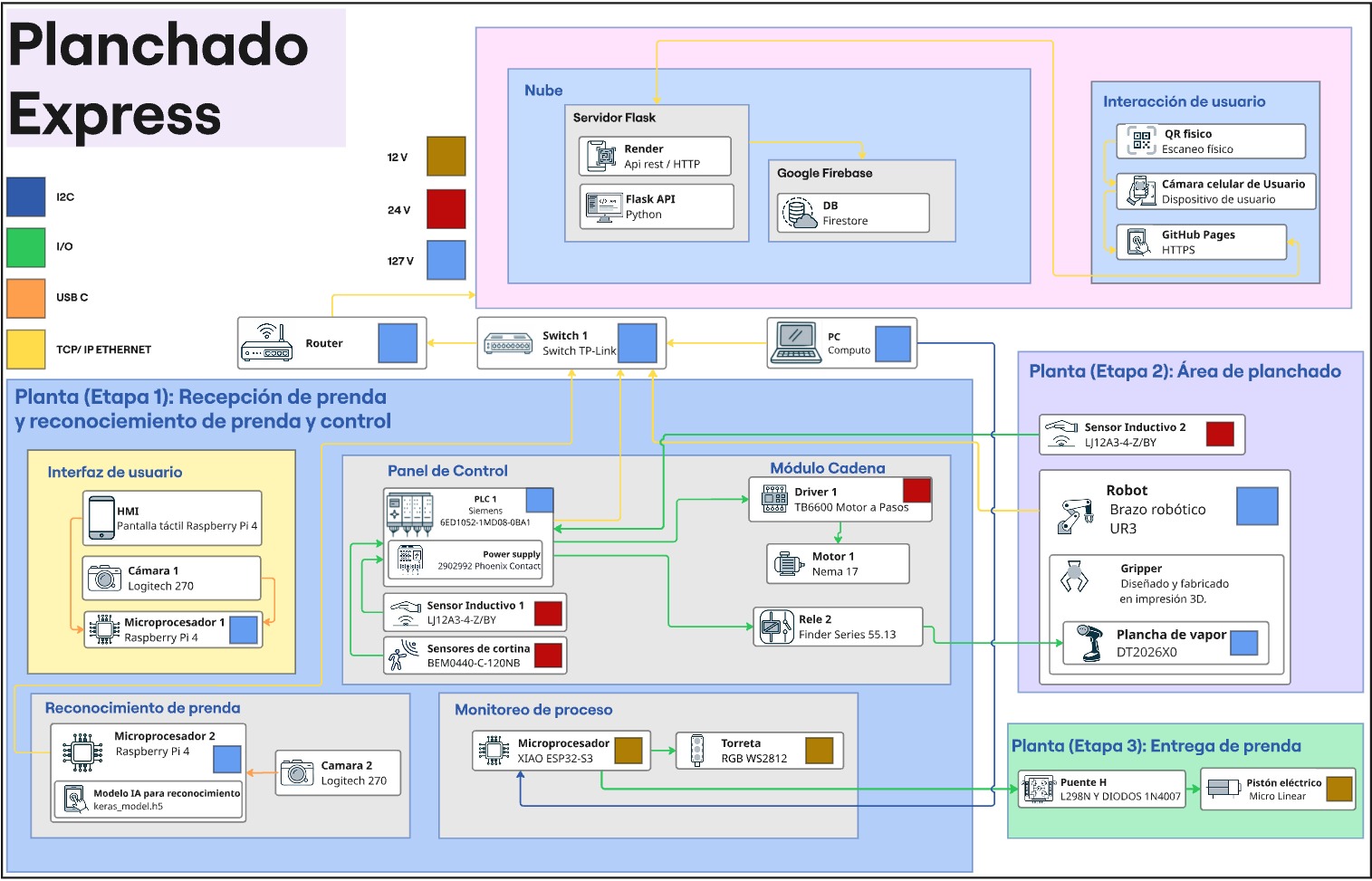
Visión general
El sistema Planchado Express es un sistema ciberfísico (CPS) compuesto por cinco capas de comunicación que operan de forma simultánea y coordinada:
| Capa | Componentes | Protocolo |
|---|---|---|
| Nube / Internet | Firebase, Render (Flask), GitHub Pages | HTTPS / REST / Firebase SDK |
| Coordinación local | Raspberry Pi 3 (rutina_maestra.py) |
Python / HTTP / Modbus / Serial |
| HMI | Raspberry Pi 3 + pantalla táctil + cámara QR | HTTPS → Firebase |
| Control industrial | PLC Allen Bradley Micro850 | Modbus TCP |
| Robótica y periféricos | UR3, ESP32, sensores, motor, pistón | Modbus TCP, Serial USB |
Diagrama de arquitectura
Protocolos de comunicación
Modbus TCP — PLC Micro850
El PLC Allen Bradley Micro850 se comunica con la Raspberry Pi mediante Modbus TCP, utilizando la librería pymodbus en Python.
PLC_IP = "192.168.3.151"
PLC_PORT = 502
PLC_UNIT_ID = 1
# Coils de salida (control)
COIL_CMD_START = 0 # 000001 — Arrancar motor
COIL_CMD_STOP = 1 # 000002 — Parar motor
COIL_CMD_DIR_FWD = 2 # 000003 — Dirección adelante
SALIDA_AUX_PLANCHA = 6 # 000007 — Activar plancha
# Entradas digitales (lectura de sensores)
SENSOR1_ADDRESS = 3 # 000004 — Barrera IR
SENSOR2_ADDRESS = 4 # 000005 — Inductivo UR3
SENSOR3_ADDRESS = 5 # 000006 — Inductivo salida
Modbus TCP — Robot UR3
El UR3 también utiliza Modbus TCP para comunicarse con la Raspberry Pi. Adicionalmente, los scripts URScript se envían directamente al robot mediante un socket TCP al puerto 30002.
ROBOT_IP = "192.168.3.71"
ROBOT_PORT = 30002
# Señales Modbus del UR3 (definidas dentro del script URScript)
modbus_add_signal("192.168.3.71", 255, 129, 3, "RX74", False)
modbus_add_signal("192.168.3.133", 255, 130, 3, "TX71", False)
HTTP REST — Raspberry Pi cámara
La Raspberry Pi orquestadora solicita la fotografía a la Raspberry Pi de cámara mediante una API Flask local:
RASPBERRY_IP = "192.168.3.162"
RASPBERRY_PORT = 5000
BASE_RPI = f"http://{RASPBERRY_IP}:{RASPBERRY_PORT}"
Serial USB — ESP32
El ESP32 recibe comandos de la Raspberry Pi mediante comunicación serial para controlar la torreta de señalización y el pistón eléctrico:
ESP32_SERIAL_PORT = "COM3"
ESP32_BAUDRATE = 115200
ESP32_TIMEOUT = 1
HTTPS/REST — Backend en Render (nube)
La rutina maestra se comunica con el backend Flask desplegado en Render para sincronizar el estado con Firebase y subir las fotografías de evidencia:
RENDER_BASE_URL = "https://docker-planchaduria.onrender.com"
Tabla de IPs y puertos del sistema
| Componente | IP / Puerto | Protocolo | Rol |
|---|---|---|---|
| PLC Micro850 | 192.168.3.151:502 |
Modbus TCP | Control de campo |
| UR3 Robot | 192.168.3.71:30002 |
Modbus TCP + Socket | Planchado |
| Raspberry Pi cámara | 192.168.3.162:5000 |
HTTP REST | Captura IA |
| Backend Render | docker-planchaduria.onrender.com |
HTTPS REST | API nube |
| Firebase | Firebase Admin SDK | HTTPS | DB + Auth + Storage |
| ESP32 | COM3 / 115200 baud | Serial USB | Pistón + Torreta |
Rol de cada componente en el CPS
Raspberry Pi 3 — Orquestador central
Es el cerebro del sistema. Ejecuta rutina_maestra.py, que coordina todos los demás componentes. Hace polling a Firebase para detectar pedidos, controla el PLC por Modbus, envía scripts al UR3, comanda el ESP32 por serial, solicita fotos a la Raspberry cámara y ejecuta el modelo de IA localmente.
PLC Allen Bradley Micro850 — Control de campo
Gestiona los actuadores físicos y los sensores del proceso: enciende/apaga el motor de la banda, lee el estado de los tres sensores (S1, S2, S3) y activa la plancha eléctrica (salida 000007). Es la interfaz entre el mundo digital y el mundo físico de la línea de producción.
UR3 — Robot colaborativo de planchado
Ejecuta las trayectorias de planchado sobre la prenda, con 7 waypoints calibrados por tipo de prenda. Recibe la instrucción de inicio vía señal Modbus y el script URScript por socket TCP. Es el actuador de mayor valor en el sistema.
ESP32 — Control periférico
Controla la torreta de señalización LED (indica el estado del sistema visualmente en planta) y el pistón eléctrico que empuja la prenda planchada hacia el gancho de salida. Se comunica con la Raspberry Pi por serial USB.
HMI — Interfaz local de operación
Panel táctil con Raspberry Pi 3 que muestra el estado del pedido en tiempo real (consultando Firebase) y lee el código QR del cliente mediante cámara integrada para validar el inicio del proceso.
Firebase — Capa de datos y sincronización
Base de datos y plataforma de autenticación en la nube. Almacena pedidos (Firestore), estado del proceso en tiempo real (Realtime Database), fotografías de evidencia (Storage) y gestiona la autenticación de usuarios (Auth).
Interfaz web — Punto de contacto con el cliente
Aplicación web en GitHub Pages que permite al cliente registrar su prenda, obtener el QR, consultar el estado del pedido y ver el historial. Se comunica directamente con Firebase mediante el SDK de JavaScript.