Diseño Mecánico
Estructura general del sistema
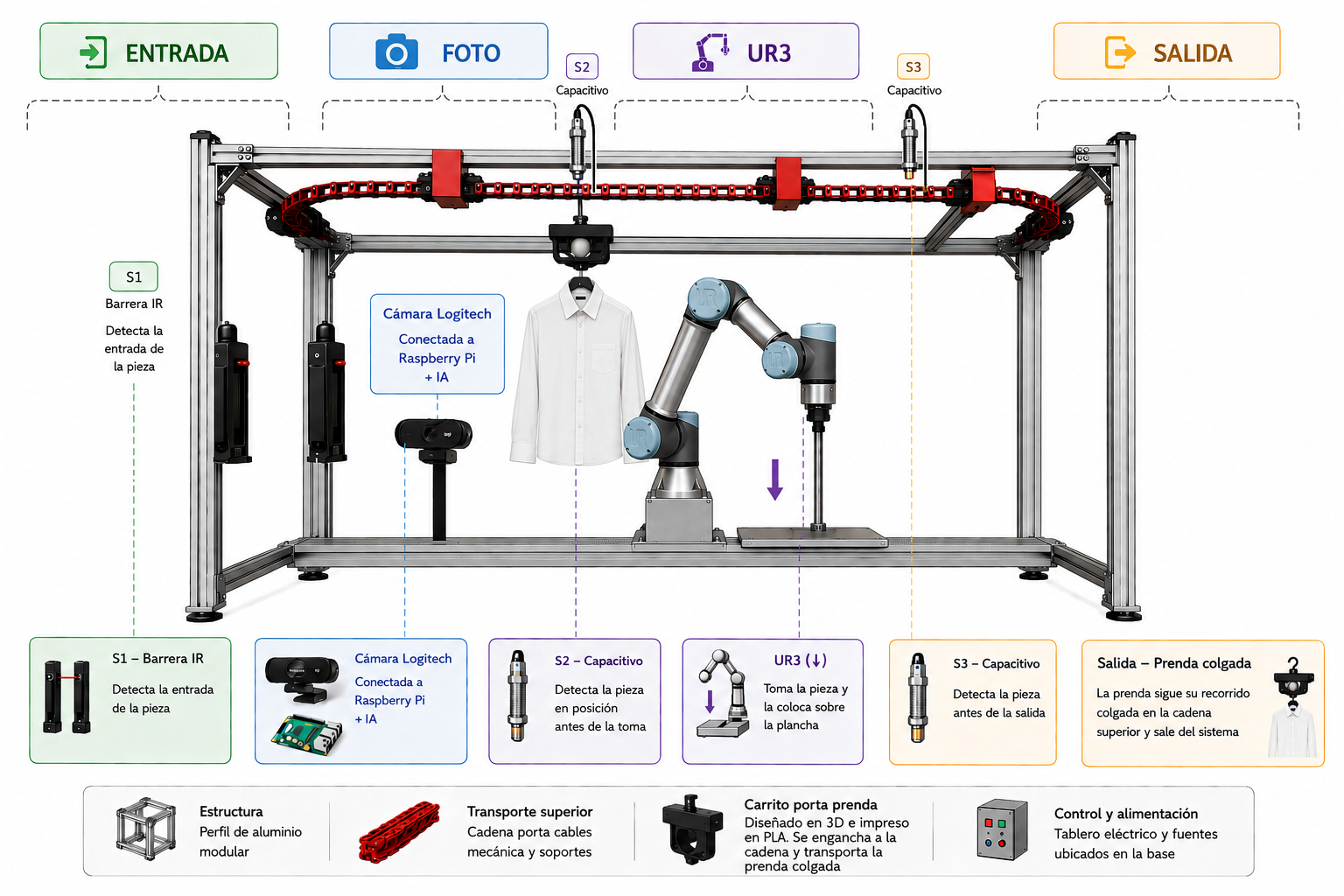
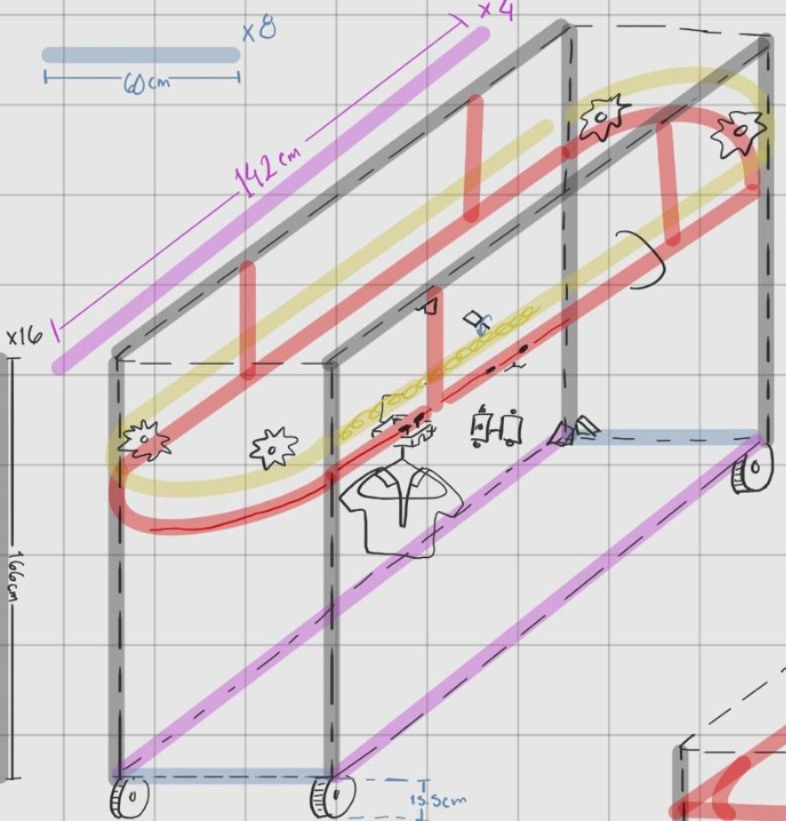
La estructura física de Planchado Express está compuesta por una banda transportadora lineal con tres estaciones de sensado y una plataforma de montaje para el robot UR3. El recorrido de la prenda va desde la entrada (sensor S1) hasta la salida por gancho (sensor S3).
Robot UR3 — Especificaciones físicas
| Parámetro | Valor |
|---|---|
| Modelo | Universal Robots UR3 |
| Tipo | Robot colaborativo (Cobot) |
| Grados de libertad | 6 DOF |
| TCP configurado | p[0.0, 0.0, 0.0777, 0.0, 0.0, 0.0] |
| Payload configurado | 0.1 kg |
| Voltaje de herramienta | 24 V |
| Gravedad configurada | [0.0, 0.0, 9.82] m/s² |
| Efector final | Agarrador impreso en PLA (fabricación propia) |
| Herramienta montada | Plancha eléctrica comercial |
| Waypoints por rutina | 7 puntos calibrados |
Efector final — Agarrador PLA
El agarrador del efector final fue diseñado y fabricado mediante impresión 3D en filamento PLA. Está dimensionado para:
- Sostener con seguridad la plancha comercial utilizada.
- Garantizar la geometría de contacto correcta con la superficie de la prenda durante las trayectorias de planchado.
- Resistir el peso y el calor transmitido por la plancha durante la operación continua.
Banda transportadora
| Parámetro | Descripción |
|---|---|
| Tipo | Banda lineal motorizada |
| Dirección | Unidireccional (adelante) |
| Control | PLC Micro850 (coils 000001, 000002, 000003) |
| Estaciones | Entrada → Foto → UR3 → Salida |
| Mecanismo de salida | Pistón eléctrico + gancho lateral |
Actuador de salida — Pistón eléctrico
El pistón eléctrico está controlado por el ESP32 mediante comandos seriales desde la Raspberry Pi. Al activarse, empuja lateralmente la prenda planchada hacia el gancho de salida donde el cliente la recoge.
| Parámetro | Valor |
|---|---|
| Tipo | Actuador lineal eléctrico |
| Control | ESP32 vía serial USB |
| Tiempo extendido | 9 segundos |
| Tiempo de espera tras cerrar | 9 segundos |
| Función | Expulsar prenda al gancho de salida |
Piezas diseñadas e impresas en 3D
Todas las piezas fueron diseñadas en CAD y fabricadas mediante impresión 3D en filamento PLA. Los archivos .stl están disponibles en la carpeta 0_IMPRIMIR/ del repositorio.
| Pieza | Vista previa | Función |
|---|---|---|
| Agarre de Plancha 1 | 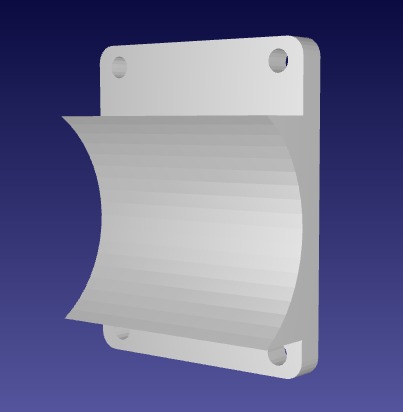 |
Sujeción principal de la plancha al efector del UR3 |
| Agarre de Plancha 2 | 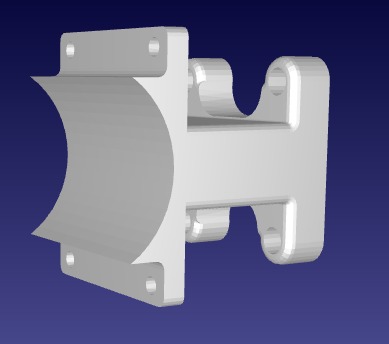 |
Pieza complementaria del agarre de plancha |
| Agarre Motor a Pasos | 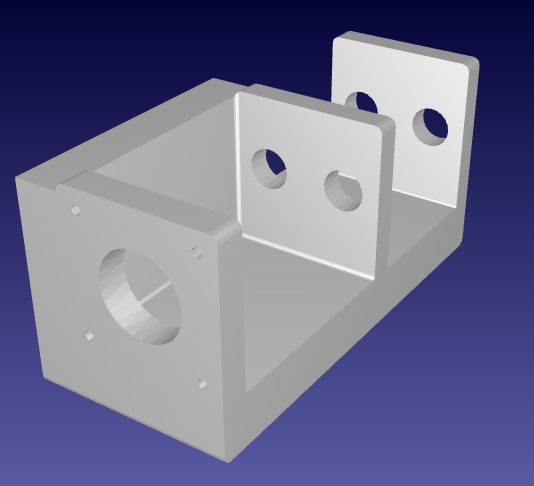 |
Montaje del motor Nema 17 en la estructura |
| Gancho |  |
Gancho de salida para entrega de prenda |
| Cadena Ganchito |  |
Eslabón de cadena para sistema de transporte |
| Carrito Base |  |
Base del carrito sobre la banda |
| Carrito Agarre | 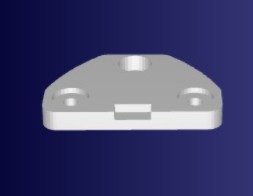 |
Agarre superior del carrito |
| Engranaje Plato | 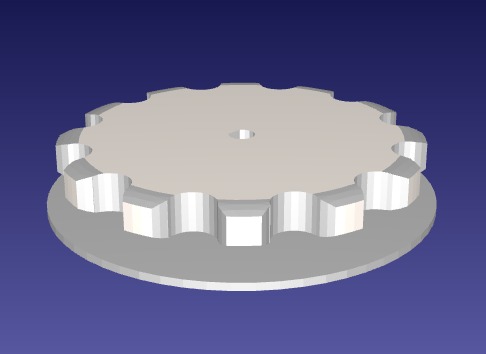 |
Engranaje de transmisión principal |
| Engranaje Final | 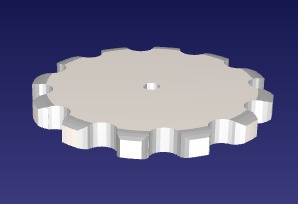 |
Engranaje de salida del sistema |
| Soporte Tensor | 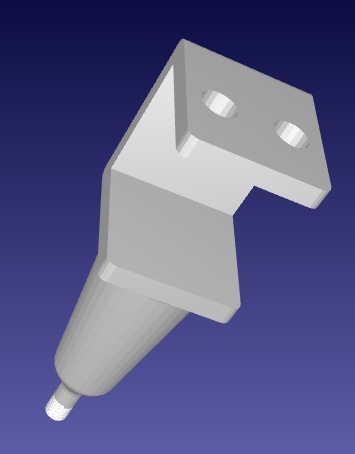 |
Soporte para sistema de tensado de banda |
| Tuerca Tensor | 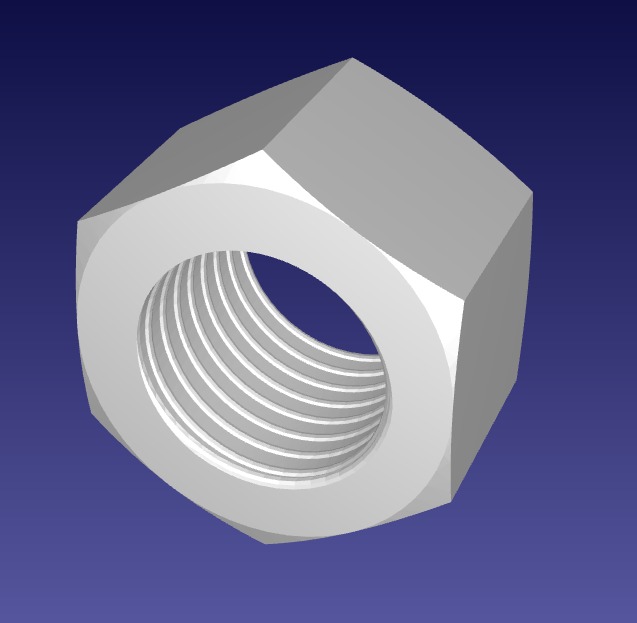 |
Elemento de ajuste del tensor |
| Tensores | 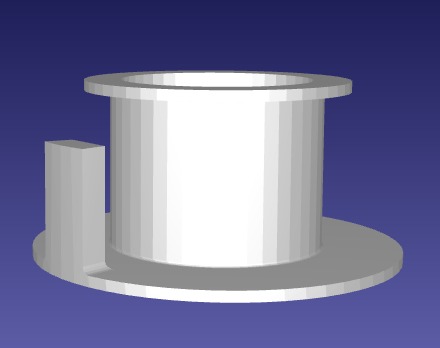 |
Componentes de tensado de la banda |
| Sensores | 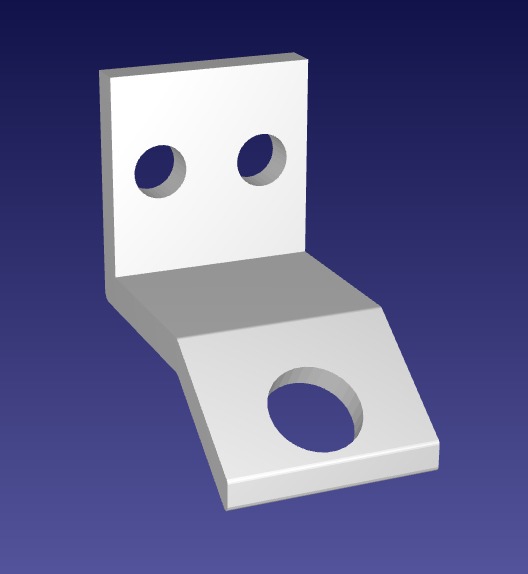 |
Soporte/montaje para sensores inductivos |
| Soporte acetato sup. |  |
Soporte superior lateral de acetato |
| Soporte acetato |  |
Soporte lateral de acetato |
| Eslabón Cadena |  |
Eslabón de Cadena |