Diseño Electrónico
Diagrama de cableado — Sistema de control mecatrónico
PLC Allen Bradley Micro850 QWB · Driver TB6600 · Motor NEMA 17 · Sensores · Plancha 120 VAC
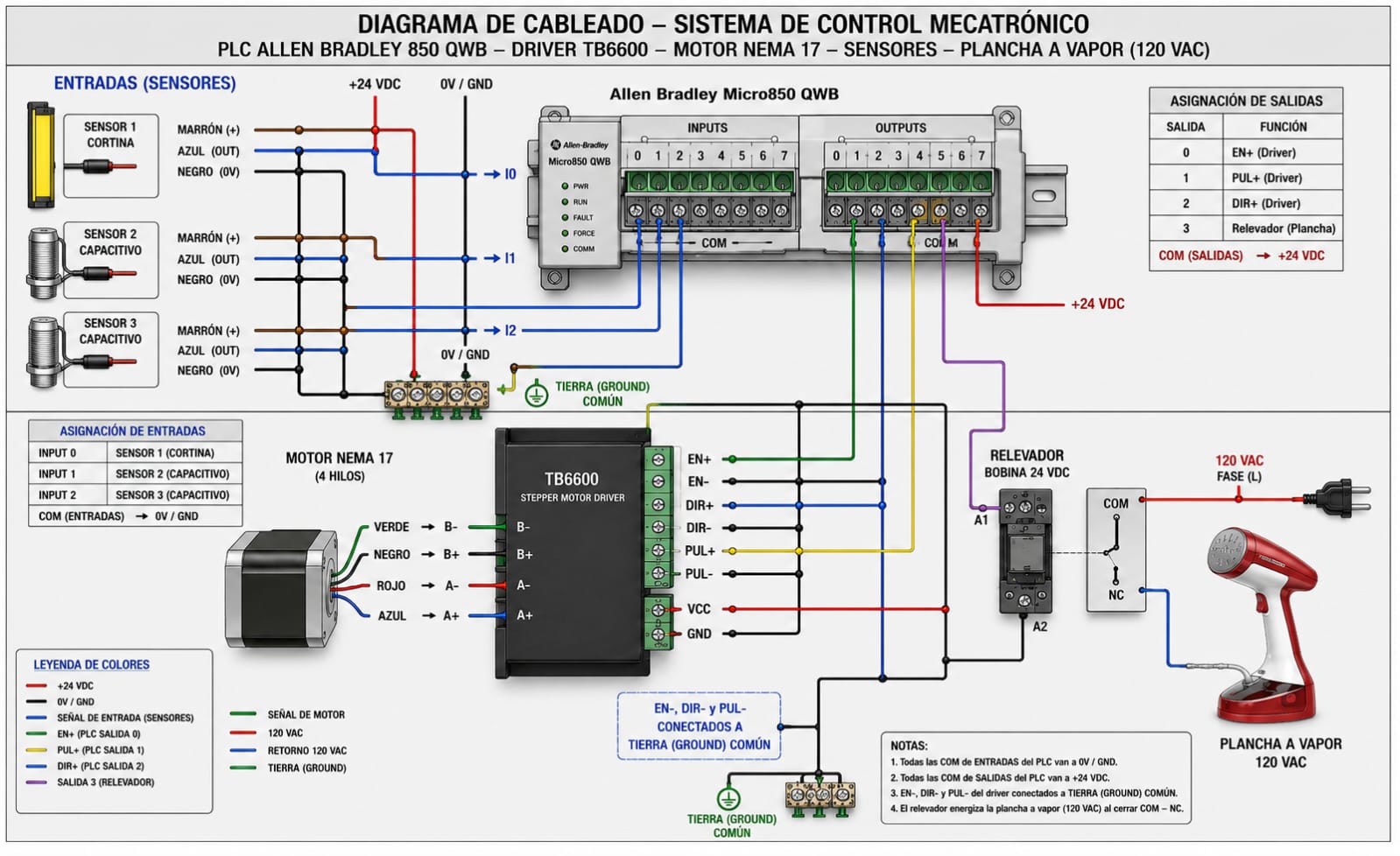
Entradas del PLC (Inputs)
| Input | Componente | Tipo | Conexión |
|---|---|---|---|
| I0 | Sensor 1 — Cortina | Digital NPN | Señal (azul OUT) → I0 · Marrón (+) → +24 V · Negro → 0 V |
| I4 | Sensor 2 — Capacitivo | Digital NPN | Señal (azul OUT) → I4 · Marrón (+) → +24 V · Negro → 0 V |
| I5 | Sensor 3 — Capacitivo | Digital NPN | Señal (azul OUT) → I5 · Marrón (+) → +24 V · Negro → 0 V |
| COM | Tierra común entradas | — | Todas las COM de entradas → 0 V / GND |
Salidas del PLC (Outputs)
| Output | Función | Destino | Observación |
|---|---|---|---|
| O0 | EN+ (Driver) | TB6600 — terminal EN+ | Habilita el driver del motor |
| O1 | PUL+ (Driver) | TB6600 — terminal PUL+ | Pulsos de paso del motor |
| O2 | DIR+ (Driver) | TB6600 — terminal DIR+ | Dirección de giro |
| O3 | Relevador (Plancha) | Bobina A1 del relevador 24 VDC | Activa la plancha 120 VAC al cerrar COM–NC |
| COM | Alimentación salidas | +24 VDC | Todas las COM de salidas → +24 V |
Conexión Motor NEMA 17 → Driver TB6600
| Cable motor | Terminal driver | Color |
|---|---|---|
| B− | B− del TB6600 | Verde |
| B+ | B+ del TB6600 | Negro |
| A− | A− del TB6600 | Rojo |
| A+ | A+ del TB6600 | Azul |
Conexión Driver TB6600 — Potencia y tierra
| Terminal driver | Conexión | Observación |
|---|---|---|
| VCC | +24 VDC | Alimentación del driver |
| GND | 0 V / GND | Retorno de potencia |
| EN− | Tierra común | Conectar a GND común del panel |
| DIR− | Tierra común | Conectar a GND común del panel |
| PUL− | Tierra común | Conectar a GND común del panel |
EN−, DIR− y PUL− deben conectarse a la misma barra de tierra común del panel de clemas.
Relevador — Activación de la plancha 120 VAC
| Terminal | Conexión |
|---|---|
| A1 (bobina +) | Salida O3 del PLC |
| A2 (bobina −) | 0 V / GND |
| COM (contacto) | Fase 120 VAC (L) |
| NC (contacto) | Terminal de la plancha |
La plancha opera a 120 VAC. El relevador aísla el circuito de control (24 VDC) del circuito de potencia (120 VAC). El contacto NC se cierra cuando el relevador se energiza, activando la plancha.
Notas generales del cableado
- Todas las COM de entradas del PLC van a 0 V / GND.
- Todas las COM de salidas del PLC van a +24 VDC.
- EN−, DIR− y PUL− del driver TB6600 conectados a tierra común.
- El relevador energiza la plancha a vapor (120 VAC) al cerrar el contacto COM–NC.
Arquitectura electrónica general
El sistema electrónico se organiza en tres capas:
- Sensado — detección del estado físico de la prenda en la línea
- Control industrial — PLC Micro850 gestiona motor, sensores y actuadores
- Actuación periférica — ESP32 controla pistón y torreta; UR3 plancha
Sensores
| Sensor | Tipo | Posición | Función | Dirección PLC |
|---|---|---|---|---|
| S1 | Barrera infrarroja | Entrada de banda | Detecta presencia de prenda al iniciar el proceso | 000004 |
| S2 | Inductivo | Estación UR3 | Confirma posición de la prenda bajo el robot | 000005 |
| S3 | Inductivo | Estación de salida | Marca fin del proceso — activa pistón | 000006 |
S1 — Sensor de barrera infrarroja
Sensor fotoeléctrico de barrera (emisor/receptor) ubicado en la entrada de la banda transportadora. Cuando la prenda interrumpe el haz de luz infrarroja, el PLC recibe la señal en la dirección 000004 y activa el motor de la banda.
S2 y S3 — Sensores inductivos
Sensores de proximidad inductivos que detectan la presencia de material metálico (estructura de la banda o porta-prenda). Se utilizan para posicionar la prenda en la estación de planchado (S2) y en la estación de salida (S3).
El sistema implementa un filtro de debounce con 3 lecturas consecutivas en 50 ms para cada sensor, eliminando falsas detecciones por ruido eléctrico o rebotes mecánicos.
PLC Allen Bradley Micro850
| Parámetro | Valor |
|---|---|
| Modelo | Allen Bradley Micro850 |
| Software de programación | Connected Components Workbench (CCW) |
| Protocolo de comunicación | Modbus TCP |
| IP en red local | 192.168.3.151 |
| Puerto Modbus | 502 |
| Unit ID | 1 |
| Entradas digitales | S1 (000004), S2 (000005), S3 (000006) |
| Salidas digitales | Motor START (000001), Motor STOP (000002), Dirección FWD (000003), Plancha (000007) |
Mapa de direcciones Modbus (offset base 0)
COIL_CMD_START = 0 # 000001 — Arrancar motor
COIL_CMD_STOP = 1 # 000002 — Parar motor
COIL_CMD_DIR_FWD = 2 # 000003 — Dirección hacia adelante
SENSOR1_ADDRESS = 3 # 000004 — Sensor barrera IR (entrada)
SENSOR2_ADDRESS = 4 # 000005 — Sensor inductivo (posición UR3)
SENSOR3_ADDRESS = 5 # 000006 — Sensor inductivo (salida)
SALIDA_AUX_PLANCHA = 6 # 000007 — Activar/desactivar plancha
Actuadores
| Actuador | Control | Dirección | Función |
|---|---|---|---|
| Motor de banda | PLC Micro850 | 000001/002/003 |
Arranque, paro y dirección de la banda transportadora |
| Plancha eléctrica | PLC Micro850 | 000007 |
Activación de la resistencia calefactora |
| Robot UR3 | URScript + Modbus | 192.168.3.71:30002 |
Ejecución de trayectorias de planchado |
| Pistón eléctrico | ESP32 vía serial | COM3 |
Empuja la prenda hacia el gancho de salida |
| Torreta luminosa | ESP32 vía serial | COM3 |
Señalización visual del estado del sistema |
ESP32 — Periféricos de salida
| Parámetro | Valor |
|---|---|
| Microcontrolador | ESP32 |
| Comunicación | Serial USB / 115200 baud |
| Puerto serial | COM3 |
| Controla | Pistón eléctrico + Torreta LED |
| Tiempo de activación del pistón | 9 segundos extendido |
| Timeout serial | 1 segundo |
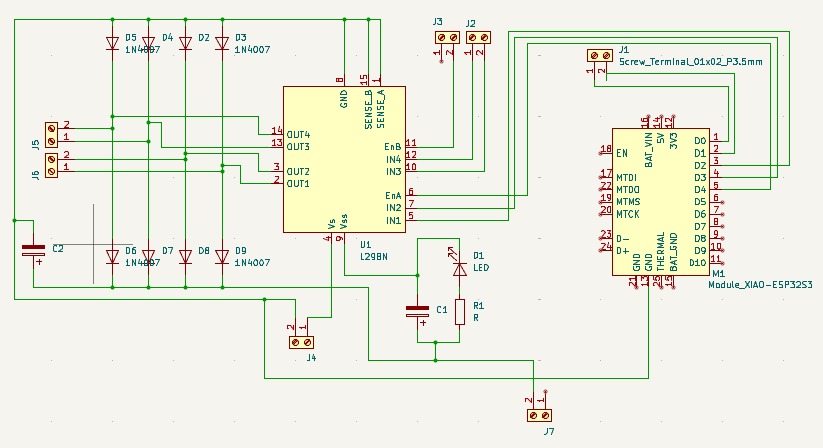
Diseño PCB para ESP32
Se diseñó una tarjeta de circuito impreso (PCB) personalizada para integrar el módulo XIAO ESP32-S3 con los actuadores del sistema. La PCB incorpora un puente H L298N para el manejo de corriente del pistón eléctrico, diodos de protección 1N4007 en configuración flyback para suprimir picos inductivos, conectores de tornillo para la torreta LED y el pistón, un LED indicador de estado y los capacitores de desacople necesarios para la estabilidad del circuito. El diseño centraliza en una sola placa la lógica de control del ESP32 y la etapa de potencia de los actuadores, simplificando el cableado del tablero y reduciendo el riesgo de conexiones sueltas durante la operación del sistema.
Raspberry Pi 3 — Nodo de cámara e IA
Una segunda Raspberry Pi 3 opera como nodo independiente de cámara e inteligencia artificial:
| Parámetro | Valor |
|---|---|
| IP en red local | 192.168.3.162 |
| Puerto Flask | 5000 |
| Función | Captura fotográfica + clasificación IA |
| Modelo IA | keras_model.h5 (Keras/TensorFlow) |
| Tamaño de imagen al modelo | 224 × 224 px |
| Clases | 0 Camisa / 1 Playera |
Recursos asociados
motor_sensor.zip
Código del sistema embebido basado en ESP32 para el control de actuadores (pistón y torreta).